Tutorial 9 - Sensor Jarak Ultrasonik Lanjutan
Selayang Pandang
Pada Tutorial 8 sebelumnya, banyak hal yang telah kita pelajari. Seperti bagaimana menghitung jarak jika diketahui kecepatan suara ultrasonik dan waktu rambat suara ultrasonik, aturan urutan prioritas menggunakan tanda kurung, dan sebagainya.
Namun, tahukah teman-teman? Kita sebenarnya belum memenuhi seluruh materi yang ada dalam bahasa pemrograman. Kali ini kita akan belajar mengenai fungsi.
Benar, fungsi yang sering kita temui seperti fungsi setup(), fungsi loop(), fungsi analogWrite(), fungsi digitalWrite(), fungsi analogRead(), fungsi digitalRead(), dan terakhir, kita mempelajari fungsi pulseIn() untuk menghitung waktu rambat suara ultrasonik pada Tutorial 8 sebelumnya.
Tahukah teman-teman, semua fungsi yang disebutkan di atas adalah fungsi yang dibuat dan disediakan oleh Arduino IDE. Dan tahukah lagi teman-teman, bahwa kita bisa membuat fungsi kita sendiri.
Keuntungan dari membuat fungsi sendiri ini ada beragam. Seperti program kita menjadi lebih ringkas, lebih mudah memanggil fungsi untuk menjalankan perintah yang kita inginkan, dan lain sebagainya yang akan disebutkan ke depannya nanti.
Penasaran bagaimana caranya? Mari kita simak bersama.
Mulai Beraksi 🚀
Kita akan menggunakan bahan dan peralatan yang sama seperti pada Tutorial 8 sebelumnya. Sebelum mulai beraksi, pastikan teman-teman sudah membaca Prasyarat, Target Pelajaran, dan Komponen Yang Dibutuhkan ya.
Klik pada salah satu dari ketiga tombol di bawah ini untuk membuka Prasyarat, Target Pelajaran dan Komponen Yang Dibutuhkan.
- Prasyarat 🔑
- Target Pelajaran 🎯
- Komponen Yang Dibutuhkan 🛠
- Sudah lolos Tutorial 7 - Alarm Sensor Cahaya Lanjutan
- Sudah mempelajari Arduino Nano Expansion Board pada materi Arduino Nano Expansion Board
Kalau teman-teman merasa belum memenuhi prasyarat yang dibutuhkan, diharapkan untuk membaca dan memenuhinya terlebih dahulu.
- Memahami bagaimana memprogram Sensor Jarak Ultrasonik menggunakan fungsi yang kita buat sendiri
- Memahami bagaimana memprogram Sensor Jarak Ultrasonik menggunakan library
- Memahami bagaimana membuat fungsi sendiri.
- 1 x Arduino Nano
- 1 x Kabel USB Arduino Nano
- 1 x Komputer/Laptop
- 1 x Sensor Jarak
- 4 x Kabel Jumper Female-Female
Penting untuk memperhatikan setiap langkah-langkah yang diberikan dan tidak melakukan apapun diluar perintah langkah yang diberikan.
Kenapa? Hal ini untuk mencegah kerusakan yang tidak diinginkan pada komponen apabila bertindak di luar langkah pelajaran yang diberikan dan tidak mengetahui dengan pasti apa yang teman-teman lakukan.
Menghubungkan Pin-Pin
Mari kita ikuti langkah-langkah yang disediakan.
- Kita akan menghubungkan pin-pin Modul Sensor Jarak ke Arduino Nano dengan menggunakan kabel jumper seperti pada gambar Wiring Diagram di bawah ini.
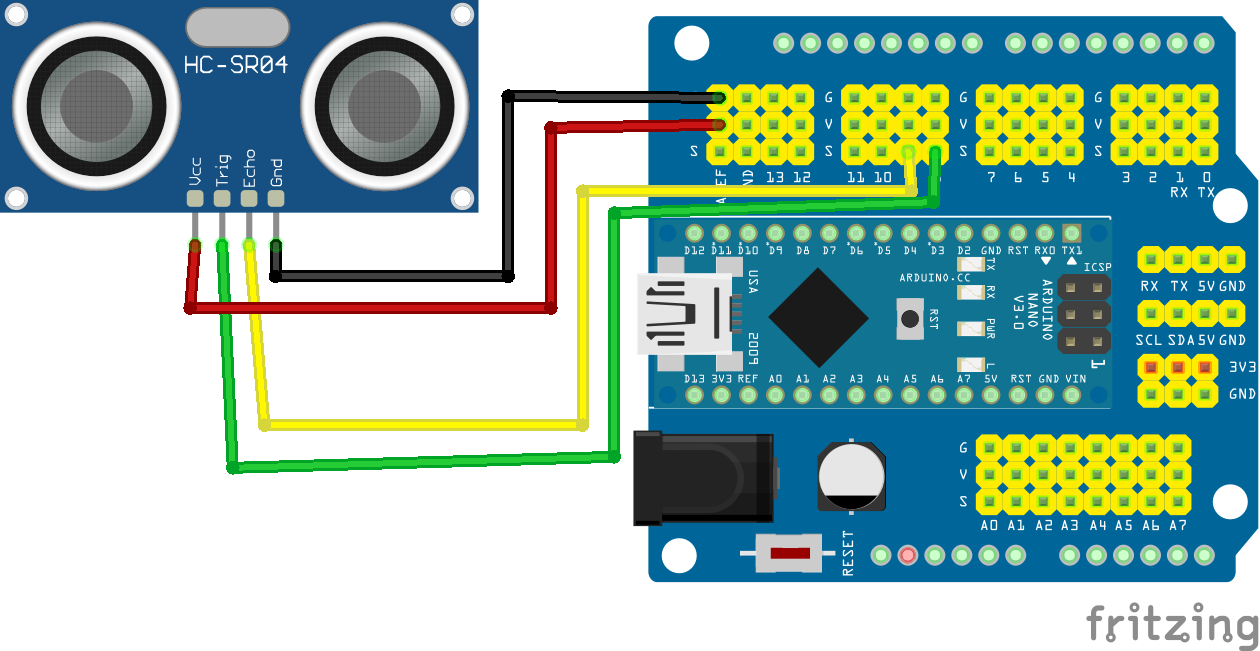
Jika gambar Wiring Diagram di atas kurang jelas, teman-teman bisa gunakan tabel Wiring Diagram di bawah ini.
| Sensor Jarak | Arduino Nano Expansion Board |
|---|---|
| VCC | V |
| Trig | 8 |
| Echo | 9 |
| GND | G |
Sebelum menyalakan Arduino Nano, harap periksa kembali rangkaiannya. Apakah sudah sama dengan Wiring Diagram?
Periksa kembali posisi pemasangan kaki-kaki. Diharapkan agar tidak terbalik dan sesuai dengan keterangan pin agar tidak merusak komponen.
Mengetik Program
Bukalah Arduino IDE, kemudian buatlah sketch baru. Beri sketch baru tersebut dengan nama TUTORIAL_9_SENSOR_JARAK_LANJUTAN dan simpan dalam folder Program Tutorials yang telah kita buat pada Tutorial 1 sebelumnya. Jika terlupa bagaimana membuat nama sketch, silahkan buka kembali Tutorial 1 sebelumnya.
Kemudian ketik program berikut pada sketch tersebut.
const int trigPin = 8;
const int echoPin = 9;
float jarak;
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
jarak=ukurJarak();
Serial.print("Jarak: ");
Serial.println(jarak);
delay(100);
}
float ukurJarak(){
float distance = 0;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
distance = ((pulseIn(echoPin, HIGH)) * 0.034) / 2;
return distance;
}
Setelah selesai mengetik program, jalankan proses verify. Dan apabila proses verify sudah berhasil, upload lah program tersebut ke Arduino Nano.
Setelah proses upload berhasil, bukalah Serial Monitor, dan amati perubahan nilai jaraknya apabila kita mendekatkan atau menjauhkan tangan kita dari Sensor Jarak.
Penjelasan Program
Sekarang kita akan menjelaskan bagaimana programnya berjalan.
const int trigPin = 8;
const int echoPin = 9;
float jarak;
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
jarak=ukurJarak();
Serial.print("Jarak: ");
Serial.println(jarak);
delay(100);
}
float ukurJarak(){
float distance = 0;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
distance = ((pulseIn(echoPin, HIGH)) * 0.034) / 2;
return distance;
}
Pada baris 1 dan 2, kita memiliki perintah untuk membuat variable trigPin dan variabel echoPin.
const int trigPin = 8;
const int echoPin = 9;
Variabel trigPin akan menyimpan angka 8 karena pin Trigger pada Sensor Jarak terhubung pada pin digital nomor 8 pada Arduino Nano.
Kemudian variabel echoPin akan menyimpan angka 9 karena pin Echo pada Sensor Jarak terhubung pada pin digital nomor 9 pada Arduino Nano.
Kemudian pada baris 4, kita membuat variabel baru bernama jarak yang akan kita gunakan untuk menyimpan angka jarak benda/tangan kita dari depan sensor jarak. Kita bebas menamainya dengan nama apapun.
float jarak;
Tipe data variabel jarak tersebut adalah float, karena kita ingin menyimpan bilangan angka desimal yang akan kita dapatkan nantinya. Karena bisa saja jarak yang kita dapatkan akan bernilai 10.21 Cm atau 12.32 Cm dan sebagainya.
Jika kita ingin menampilkan jarak yang berupa bilangan bulat saja seperti 10 cm atau 12 cm, maka kita harus mengganti float menjadi int, sehingga bilangan desimal dibelakang 10 atau 12 akan diabaikan.
Kemudian pada fungsi setup() terdapat perintah Serial.begin() untuk memulai komunikasi serial antara Arduino Nano dengan laptop/komputer kita serta perintah pinMode() untuk menugaskan pin trigPin sebagai pin OUTPUT dan menugaskan pin echoPin sebagai pin INPUT.
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
Selanjutnya, kita akan masuk ke dalam fungsi loop().
Jika teman-teman perhatikan, hasil program di atas sama seperti pada program yang kita gunakan pada Tutorial 8 sebelumnya.
Namun, mengapa fungsi loop() yang kita gunakan pada Tutorial 9 ini lebih sedikit jika dibandingkan dengan fungsi loop() yang kita gunakan pada Tutorial 8 sebelumnya?
- fungsi loop() Tutorial 9
- fungsi loop() Tutorial 8
void loop() {
jarak=ukurJarak();
Serial.print("Jarak: ");
Serial.println(jarak);
delay(100);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration * 0.0343) / 2;
Serial.print("Jarak: ");
Serial.println(distance);
delay(100);
}
Kita akan mengetahui jawabannya sebentar lagi. Namun kita ulas terlebih dahulu fungsi loop() milik Tutorial 9 ini. Fungsi loop() milik Tutorial 9 dimulai dari baris 12 karena tanda kurawal buka { berada pada baris 12 dan diakhiri pada baris 20 karena tanda kurawal tutup } berada pada baris 19.
const int trigPin = 8;
const int echoPin = 9;
float jarak;
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
jarak=ukurJarak();
Serial.print("Jarak: ");
Serial.println(jarak);
delay(100);
}
float ukurJarak(){
float distance = 0;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
distance = ((pulseIn(echoPin, HIGH)) * 0.034) / 2;
return distance;
}
Dan di dalam fungsi loop() tersebut terdapat beberapa perintah dari baris 13 hingga baris 18.
Perintah pertama berada pada baris 13. Pada baris 13 tersebut, kita memanggil fungsi yang bernama ukurJarak(). Fungsi tersebut merupakan fungsi yang dibuat sendiri dimana di dalam fungsi tersebut terdapat beberapa baris kode program untuk menghitung jarak antara sensor jarak dengan benda/tangan kita.
Hasil perhitungan jarak antara sensor jarak dengan benda/tangan kita yang telah selesai dihitung oleh fungsi ukurJarak() tersebut kemudian akan disimpan dalam variabel bernama jarak.
Ingat kembali bahwa pada baris 4, kita telah membuat variabel bernama jarak dengan tipe data float yang digunakan untuk menyimpan bilangan desimal. Oleh karenanya, sebagai permisalan, jika hasil perhitungan ukurJarak() yang dihasilkan berupa bilangan desimal seperti 10.21, maka akan disimpan ke dalam variabel jarak tersebut.
Selanjutnya pada baris 15 terdapat perintah untuk mencetak teks "Jarak: " ke Serial Monitor menggunakan perintah Serial.print.
Setelah itu, pada baris 16, terdapat perintah untuk mencetak nilai yang disimpan dalam variabel jarak ke Serial Monitor menggunakan perintah Serial.println.
Perintah terakhir yang ada dalam fungsi loop() berada pada baris 18, yakni perintah untuk menunda program selama 100 mili sekon dengan menggunakan perintah delay(100).
Itulah semua perintah yang ada di dalam fungsi loop(). Singkat sekali bukan?
Apakah dengan demikian, penjelasan programnya selesai sampai sini? karena selama ini, topik Penjelasan Program selalu selesai jika sudah mencapai bagian terakhir dari fungsi loop().
Tentu saja tidak. Karena pada Tutorial 9 kali ini, setelah fungsi loop() selesai, masih ada fungsi lagi, yakni fungsi yang dibuat sendiri. Apa itu fungsi yang dibuat sendiri?
Jika kita lihat pada fungsi analogWrite(), analogRead(), digitalRead() dan sebagainya, semua itu adalah fungsi yang dibuat oleh Arduino IDE, dan bukan dibuat oleh kita sehingga kita tinggal memakainya saja.
Sedangkan, fungsi yang dibuat sendiri, atau bahasa Inggris nya yang sering disebut oleh programmer luar negeri, "self-built function", adalah fungsi yang dibuat oleh pengguna itu sendiri.
Fungsi yang kita buat sendiri pada Tutorial ini bernama ukurJarak() dan berada pada baris 21 hingga baris 33. Sama seperti fungsi setup() dan fungsi loop(), perintah dalam suatu fungsi selalu diapit oleh tanda kurawal buka { dan tanda kurawal tutup }.
const int trigPin = 8;
const int echoPin = 9;
float jarak;
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
jarak=ukurJarak();
Serial.print("Jarak: ");
Serial.println(jarak);
delay(100);
}
float ukurJarak(){
float distance = 0;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
distance = ((pulseIn(echoPin, HIGH)) * 0.034) / 2;
return distance;
}
Mari kita bedah, perintah apa saja yang terdapat dalam fungsi ukurJarak().
Pada baris 22 program di atas, kita membuat variabel baru bernama distance dengan tipe data float sehingga variabel tersebut bisa menyimpan bilangan desimal.
Perhatikan pula terdapat angka 0 pada baris 22 tersebut yang berarti variabel distance akan menyimpan angka awal sebesar 0 tiap kali fungsi ukurJarak() dipanggil.
Jadi variabel distance akan selalu menyimpan angka awal 0 tiap kali fungsi ukurJarak() dipanggil dan apabila perhitungan untuk mengukur jarak di dalam fungsi ukurJarak() selesai dihitung, angka 0 tadi akan digantikan oleh hasil perhitungan baru tersebut.
Kemudian pada baris 24 dan 25, terdapat perintah untuk memastikan komponen T sensor jarak tidak memancarkan suara ultrasonik apapun selama 2 mili sekon.
Hal ini dilakukan dengan cara memberikan logika LOW pada pin trigPin menggunakan perintah digitalWrite(), kemudian perintah delayMicroseconds(2) membuat baris 24 tertunda selama 2 mikro detik sehingga membuat pin trigPin menerima logika LOW selama 2 detik.
Selanjutnya pada baris 27, karena pin trigPin diberi logika HIGH menggunakan perintah digitalWrite(), menyebabkan komponen T sensor jarak akan memancarkan suara ultrasonik selama 10 mikro detik karena kita memerintahkan untuk menunda program selama 10 mili detik melalui perintah delayMicroseconds(10) yang terdapat pada baris 28.
Setelah selesai memancarkan suara ultrasonik selama 10 mikro detik, kita memberi logika LOW pada pin trigPin dengan perintah digitalWrite() pada baris 29 sehingga komponen T sensor jarak akan berhenti memancarkan suara ultrasonik.
Setelahnya, barulah kita masuk ke dalam persamaan untuk menghitung jarak yang terdapat pada baris 31. Persamaan yang kita masukkan pada baris 31 ini sama seperti dengan persamaan yang kita gunakan pada Tantangan 2 Tutorial 8 sebelumnya.
((pulseIn(echoPin, HIGH)) * 0.034) / 2;
Dimana kita mengukur lama waktu yang ditempuh oleh suara ultrasonik untuk merambat dengan menggunakan fungsi pulseIn(). Karena berada dalam tanda kurung, maka fungsi pulseIn() ini akan dijalankan terlebih dahulu sebelum dilakukan perkalian dengan 0.034.
Setelah diketahui waktu yang ditempuh oleh suara ultrasonik untuk merambat, maka selanjutnya dikali dengan angka 0.034. Hasil perkalian antara waktu tempuh dengan angka 0.034 kemudian dibagi dengan angka 2.
Hasil persamaan tersebut kemudian disimpan dalam variabel distance. Ingat kembali bahwa awalnya variabel distance adalah berisi nilai 0. Sekarang variabel distance akan berisi berapapun hasil perhitungan persamaan pada baris 31 tersebut.
Kode perintah terakhir yang dimiliki oleh fungsi ukurJarak() adalah perintah return yang berada pada baris 33. Kata return dalam bahasa Indonesia berarti "Mengembalikan". Sehingga perintah tersebut adalah perintah untuk mengembalikan nilai yang tersimpan dalam variabel distance ke fungsi ukurJarak().
Kini, sama seperti variabel distance, fungsi ukurJarak() menyimpan nilai hasil perhitungan persamaan pada baris 31 tadi dan menunggu untuk dipanggil lagi pada baris 13 dalam fungsi loop().
Ingat kembali, semua perintah yang berada dalam fungsi loop() akan berjalan terus menerus. Sementara fungsi ukurJarak() yang kita buat sendiri berada di luar fungsi loop() sehingga akan berjalan jika kita memanggil fungsi ukurJarak() tersebut ke dalam fungsi loop() sebagaimana yang kita lakukan pada baris 13 dalam fungsi loop().
Tantangan Tutorial 9
Sebelum masuk ke Tantangan Tutorial 9, kita sarankan teman-teman membuat sketch baru dan menyimpan sketch tersebut dengan nama TUTORIAL_9_SENSOR_JARAK_CHALLENGE dan simpanlah dalam folder Program Tutorials. Agar sketch awal yang telah teman-teman buat pada langkah sebelumnya tidak terhapus. Sehingga teman-teman memiliki dua buah sketch untuk tiap tutorial.
Tantangan 1
Baik, selanjutnya kita akan masuk ke topik tantangan pertama yang fokus utamanya adalah untuk membantu teman-teman lebih paham dan terbiasa lagi dengan konsep fungsi yang dibuat sendiri atau self-built function. Mengapa? karena ke depannya, konsep self-built function atau fungsi yang dibuat sendiri akan sering kita gunakan untuk mempermudah atau mempersingkat kode program agar lebih rapi.
Selain itu, kita tidak perlu melakukan berulang kali menulis perintah yang sama. Dengan fungsi yang dibuat sendiri, kita cukup membuat perintah tertentu sekali saja, kemudian jika kita ingin mengunakannya, kita cukup memanggilnya berkali-berkali sebanyak yang kita inginkan.
Sebagai contoh, apabila kita ingin membuat garis unik yang berbeda-beda untuk menghias Serial Monitor kita ketika kita menampilkan pesan teks atau informasi seperti pada gambar di bawah ini,
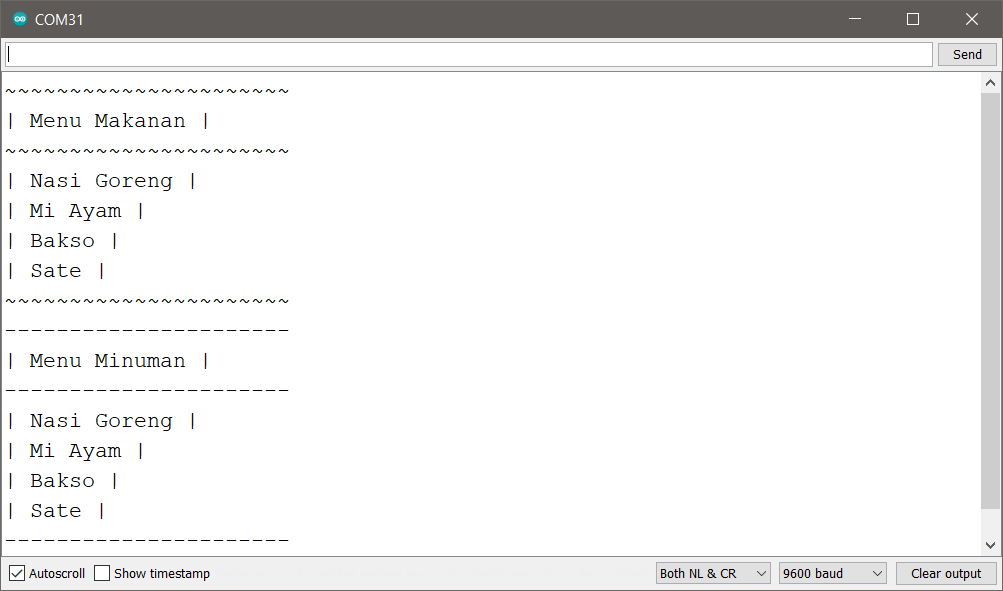
Di bawah ini adalah program yang digunakan untuk membuat pesan teks pada gambar di atas.
void setup() {
Serial.begin(9600);
Serial.println("~~~~~~~~~~~~~~~~~~~~~~");
Serial.println("| Menu Makanan |");
Serial.println("~~~~~~~~~~~~~~~~~~~~~~");
Serial.println("| Nasi Goreng |");
Serial.println("| Mi Ayam |");
Serial.println("| Bakso |");
Serial.println("| Sate |");
Serial.println("~~~~~~~~~~~~~~~~~~~~~~");
Serial.println("----------------------");
Serial.println("| Menu Minuman |");
Serial.println("----------------------");
Serial.println("| Es Teh |");
Serial.println("| Jus Jeruk |");
Serial.println("| Bakso |");
Serial.println("| Sate |");
Serial.println("----------------------");
}
void loop() {
}
Perhatikan bahwa kita memasukkan semua pesan teks dalam fungsi setup() dan kita membiarkan fungsi loop() kosong. Karena kita ingin pesan teks tersebut hanya dicetak sekali saja. Bayangkan jika teman-teman memasukkan semua pesan teks tersebut ke dalam fungsi loop(), maaka teman-teman akan melihat Serial Monitor mencetak pesan teks tersebut berulang-ulang secara terus menerus.
Namun, kita bukan ingin kembali mengajarkan tentang perbedaan fungsi setup() dan fungsi loop() kali ini. Perhatikan pada baris 3, 5, dan 10, kita memasukkan garis bergelombang ~~~~~~ . Serta kita memasukkan garis putus-putus -------- pada baris 11, 13, dan 18.
Jika kita menggunakan copy paste saja untuk membuat garis-garis tersebut berulang-ulang, mungkin memang dirasa mudah. Namun, bagaimana jika membuat fungsi sendiri dan jika kita ingin memasukkan garis bergelombang dan garis putus-putus, kita tinggal memanggil garis tersebut dengan fungsi yang telah kita buat sesuai namanya?
Mari simak bagaimana caranya dalam program berikut. Sebelum mulai mengetik, tutuplah dahulu Serial Monitor jika masih terbuka. Kemudian cobalah ketik dan upload program berikut ke Arduino Nano teman-teman dan lihat bagaimana hasilnya pada Serial Monitor.
void setup() {
Serial.begin(9600);
garisGelombang();
Serial.println("| Menu Makanan |");
garisGelombang();
Serial.println("| Nasi Goreng |");
Serial.println("| Mi Ayam |");
Serial.println("| Bakso |");
Serial.println("| Sate |");
garisGelombang();
garisPutusPutus();
Serial.println("| Menu Minuman |");
garisPutusPutus();
Serial.println("| Es Teh |");
Serial.println("| Jus Jeruk |");
Serial.println("| Bakso |");
Serial.println("| Sate |");
garisPutusPutus();
}
void loop() {
}
void garisGelombang(){
Serial.println("~~~~~~~~~~~~~~~~~~~~~~");
}
void garisPutusPutus(){
Serial.println("----------------------");
}
Hasilnya akan seperti pada gambar di bawah ini bukan?
Mengapa demikian?
Hal ini bisa terjadi karena kita telah membuat dua buah fungsi yang dibuat sendiri. Bisakah teman-teman menebak apa nama kedua fungsi yang dibuat sendiri dalam program tersebut?
Jika tebakan teman-teman adalah garisGelombang() dan garisPutusPutus(), maka tebakan teman-teman benar. Kita bisa dengan bebas menentukan nama fungsi yang dibuat sendiri sesuai dengan keinginan kita.
Misalnya seperti garisBergelombang() atau garisPutus(). Nama apapun tak masalah selama nama fungsi tersebut mudah diingat oleh teman-teman ketika kita ingin memanggilnya untuk menggunakan fungsi tersebut.
Bisakah teman-teman menebak, dalam fungsi setup(), pada baris nomor berapa fungsi garisGelombang() dipanggil? Jika teman-teman menjawab pada baris 3, 5, dan 10, maka jawaban teman-teman benar. Teman-teman juga pasti tahu fungsi garisPutusPutus() dipanggil pada baris nomor berapa.
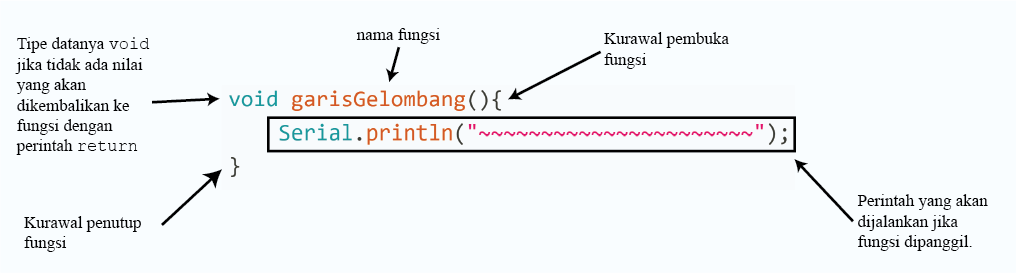
Mari kita bedah anatomi fungsi garisGelombang() melalui gambar di bawah ini
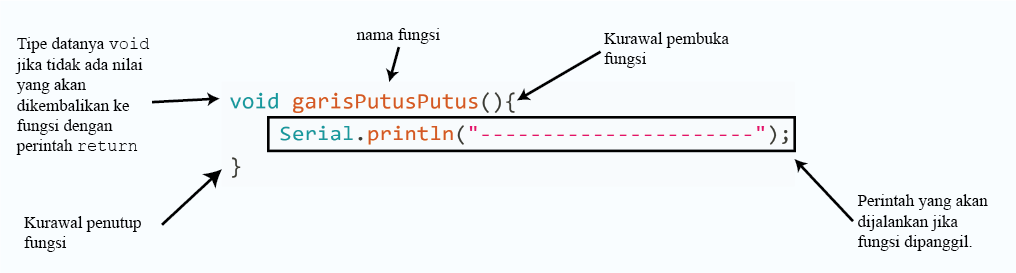
Dan anatomi fungsi garisPutus() melalui gambar di bawah ini
Itulah serunya jika kita bisa membuat fungsi sendiri. Kita tinggal memanggil nama fungsi dengan kemampuan yang kita butuhkan pada baris berapapun. Dengan demikian, kita tidak perlu melakukan copy paste berulang-ulang untuk membuat baris kode program yang sama.
Tantangan 2
Kali ini kita akan mencoba meningkatkan tantangannya. Kita akan mencoba untuk membuat fungsi penjumlahan, pengurangan, perkalian, dan pembagian.
Sebagai contoh awal, cobalah ketik dan upload program di bawah ini.
int jumlah;
void setup() {
Serial.begin(9600);
jumlah=2+3+3;
Serial.print("Hasil penjumlahan: ");
Serial.println(jumlah);
}
void loop() {
}
Hasil yang teman-teman dapatkan pasti seperti ini
Untuk penjelasan programnya, pada baris 1, kita membuat sebuah variabel bernama jumlah yang bertipe int. Variabel ini akan kita gunakan untuk menyimpan nilai hasil penjumlahan yang kita buat.
Kemudian dalam fungsi setup() pada baris 5, terdapat persamaan matematika 2+3+3, setelah operasi persamaan matematika tersebut dihitung, akan menghasilkan angka 8. Angka 8 tersebut akan disimpan dalam variabel jumlah.
Kemudian angka dalam variabel jumlah tersebut akan dicetak pada Serial Monitor dengan menggunakan perintah Serial.println pada baris 7.
Jika kita ingin menjumlahkan suatu angka, kita harus mengetik angka-angka yang ingin kita jumlahkan. Kemudian menyimpannya ke dalam suatu variabel. Tentunya variabel tersebut harus kita buat terlebih dahulu sebelumnya di atas fungsi setup().
Namun, jika kita membuat fungsi sendiri dengan nama jumlah() dan kita tinggal memasukkan angka-angka yang ingin kita jumlahkan ke dalam parameter fungsi jumlah() tadi sehingga akan menjadi seperti jumlah(2,3,4), maka hasilnya juga pasti akan bernilai 8. Bagaimana caranya? Mari simak program berikut
void setup() {
Serial.begin(9600);
Serial.print("Hasil penjumlahan: ");
Serial.println(jumlah(2,3,3));
}
void loop() {
}
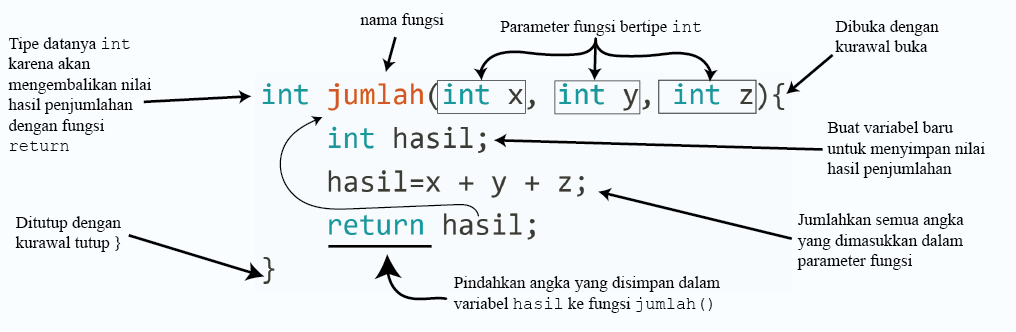
int jumlah(int x, int y, int z){
int hasil;
hasil=x + y + z;
return hasil;
}
Jika teman-teman mengupload programnya, maka hasil yang teman-teman dapatkan pasti sama juga seperti pada program sebelumnya bukan? Dan fungsi setup() menjadi lebih ringkas bukan?
Mari kita bedah anatomi fungsi yang kita buat sendiri melalui ilustrasi berikut:
Kalau teman-teman perhatikan kembali fungsi garisGelombang() pada fungsi sebelumnya, kita tinggal memanggilnya saja tanpa harus menulis parameter apapun dalam tanda kurung fungsi tersebut. Namun berbeda dengan fungsi jumlah() yang mengharuskan kita untuk memasukkan angka ke dalam tanda kurungnya seperti jumlah(3,2,1). Mengapa demikian?
Perhatikan bahwa fungsi jumlah() memiliki tiga buah parameter yakni, parameter bernama x, y, dan z. Ketiga parameter tersebut bertipe data int. Ketiga parameter ini akan berfungsi untuk menyimpan nilai yang ingin kita hitung hasil penjumlahannya dengan menggunakan fungsi jumlah().
Misalnya jika kita ketik seperti pada di bawah ini
jumlah(3, 2, 1);
Maka, angka 3 akan disimpan dalam parameter x dan angka 2 disimpan dalam parameter y dan terakhir, angka 1 disimpan dalam parameter z. Sehingga, pada operasi penjumlahannya
hasil=x + y + z;
sama dengan
hasil=3 + 2 + 1;
Jika dimisalkan kita memasukkan angka desimal ke dalam parameter tersebut, seperti
jumlah(23.31, 27.5, 112.2);
Ingat kembali, bahwa dalam bahasa pemrograman, tanda koma untuk bilangan desimal disimbolkan sebagai titik. Jadi, jika kita ingin menulis 3 koma 9 dalam program, maka kita akan menulisnya 3.9
Maka program hanya akan mengambil dan menyimpan angka di depan tanda koma saja dan mengabaikan angka setelah tanda koma sehingga akan menjadi seperti di bawah ini
hasil=23 + 27 + 112;
Fungsi jumlah() tersebut hanya akan bisa menjumlahkan bilangan bulat saja. Mengapa demikian? karena parameter x, y, dan z sudah kita buat dengan menggunakan tipe data int.
Apabila kita ingin supaya fungsi jumlah() bisa menjumlahkan bilangan desimal juga, kita harus mengganti tipe data pada parameter x, y, dan z dengan tipe data float sehingga ketiga parameter tersebut bisa menyimpan angka setelah tanda koma.
Sekarang tantangannya, cobalah teman-teman modifikasi agar fungsi jumlah() bisa menyimpan dan menjumlahkan bilangan desimal.